|
Xingyu Chen Currently, I am a PhD student focus on humanoid, and start my research journey with Prof. Renjing Xu in HKUST(GZ). Previously, I am a Robotics Animation Engineer at Xiaomi in 2025. Prior to that, I obtained M.Sc degree from University College London in 2024. |

|
Highlight
|
ResearchParticularly, I am interested in physical intelligence via spatial computing. |
|
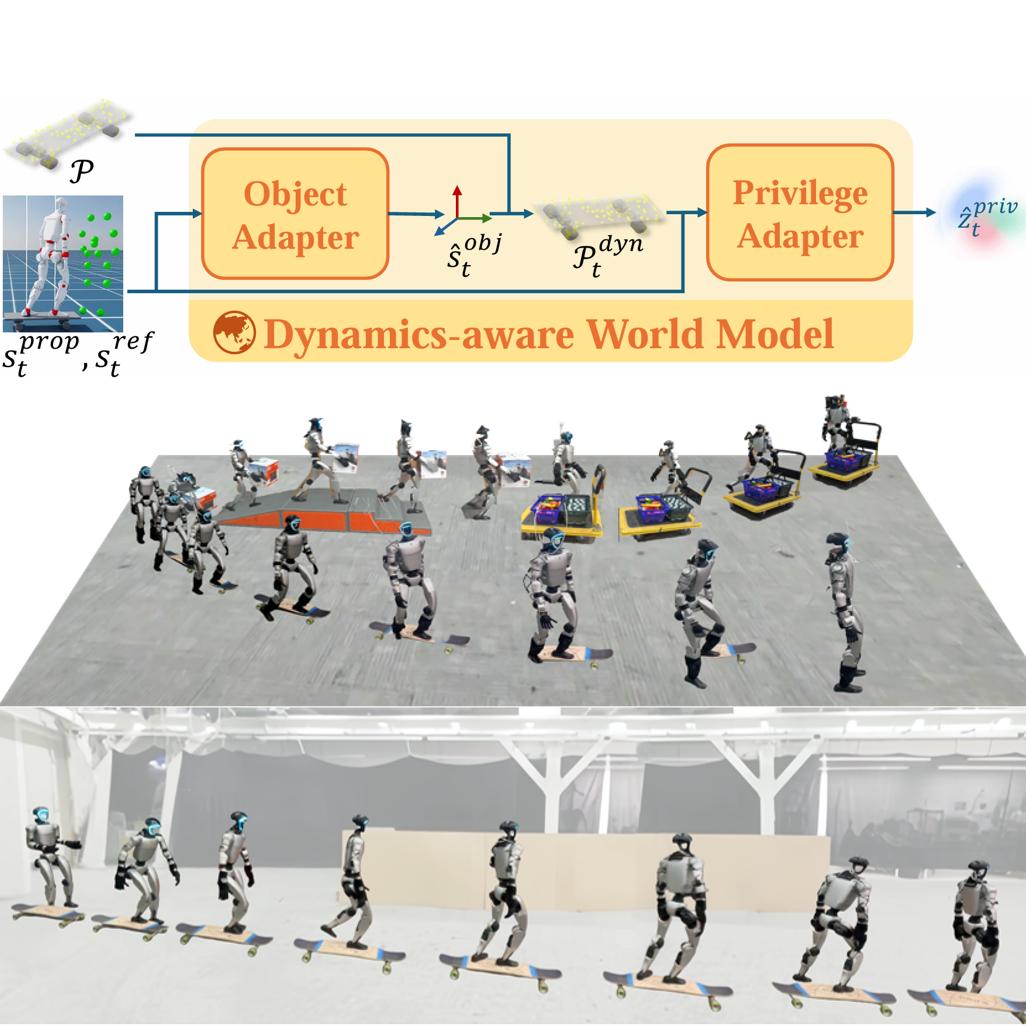
HAIC: Humanoid Agile Object Interaction Control via Dynamics-Aware World Model
Dongting Li*, Xingyu Chen*, Qianyang Wu, Bo Chen, Sikai Wu, Hanyu Wu, Guoyao Zhang, Liang Li, Mingliang Zhou, Diyun Xiang, Jianzhu Ma, Qiang Zhang, Renjing Xu Robotics: Science and Systems (RSS), 2026 [project page] [arXiv] [code] A world model completes the full-state object observation during dynamic interaction. |
|
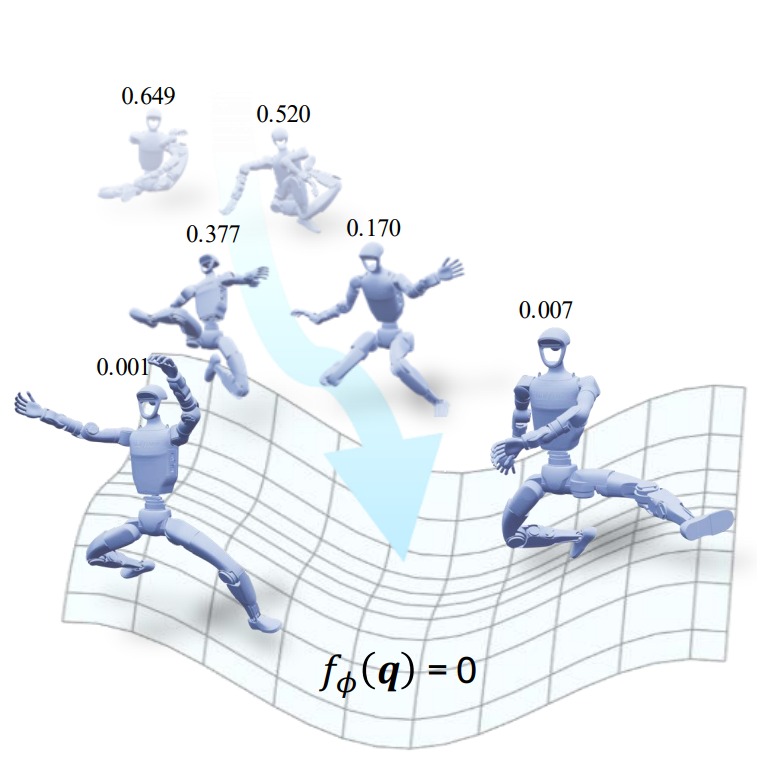
PDF-HR: Pose Distance Fields for Humanoid Robots
Yi Gu*, Yukang Gao*, Yangchen Zhou*, Xingyu Chen, Yixiao Feng, Mingle Zhao, Yunyang Mo, Zhaorui Wang, Lixin Xu, Renjing Xu Arxiv preprint, 2026 [project page] [arXiv] [code] A continuous distance field for modeling humanoid robotics pose distribution. |
|
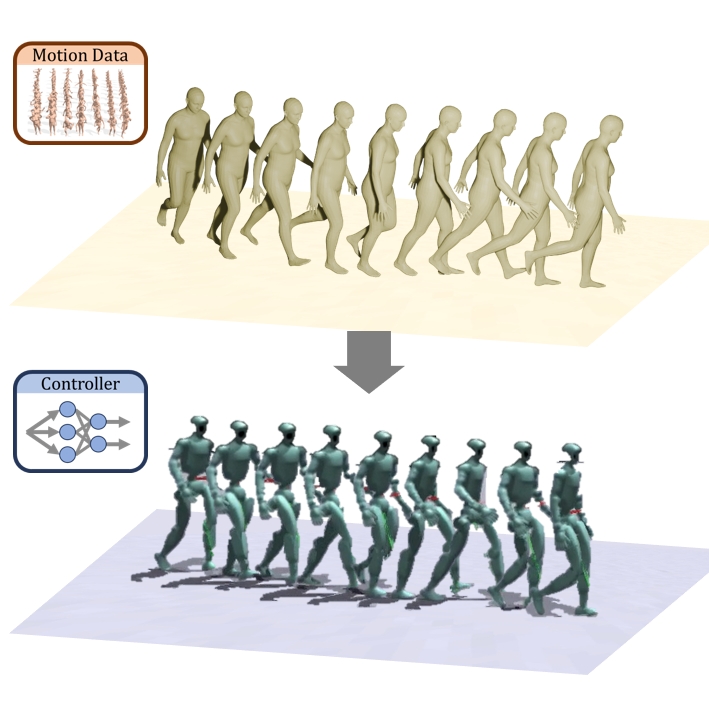
Implicit Kinodynamic Motion Retargeting for Human-to-humanoid Imitation Learning
Xingyu Chen, Hanyu Wu, Sikai Wu, Mingliang Zhou, Diyun Xiang, Haodong Zhang Arxiv preprint, 2025 [project page] [arXiv] [code] A real-time large-scale human-to-humanoid motion retargeting by style transfer. |
|
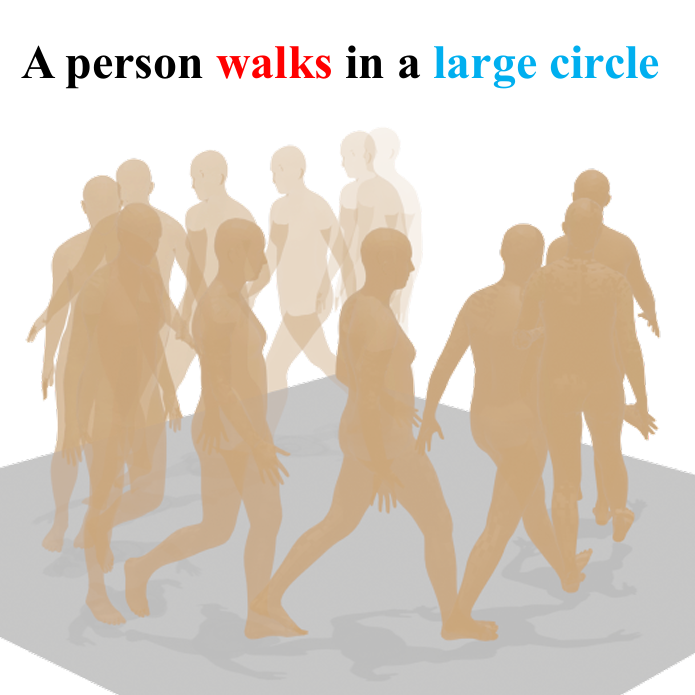
Text-driven Human Motion Generation with Motion Masked Diffusion Model
Xingyu Chen Arxiv preprint, 2024 [arXiv] A spatial-temporal mask strategy for text-driven human motion diffusion model. |
|
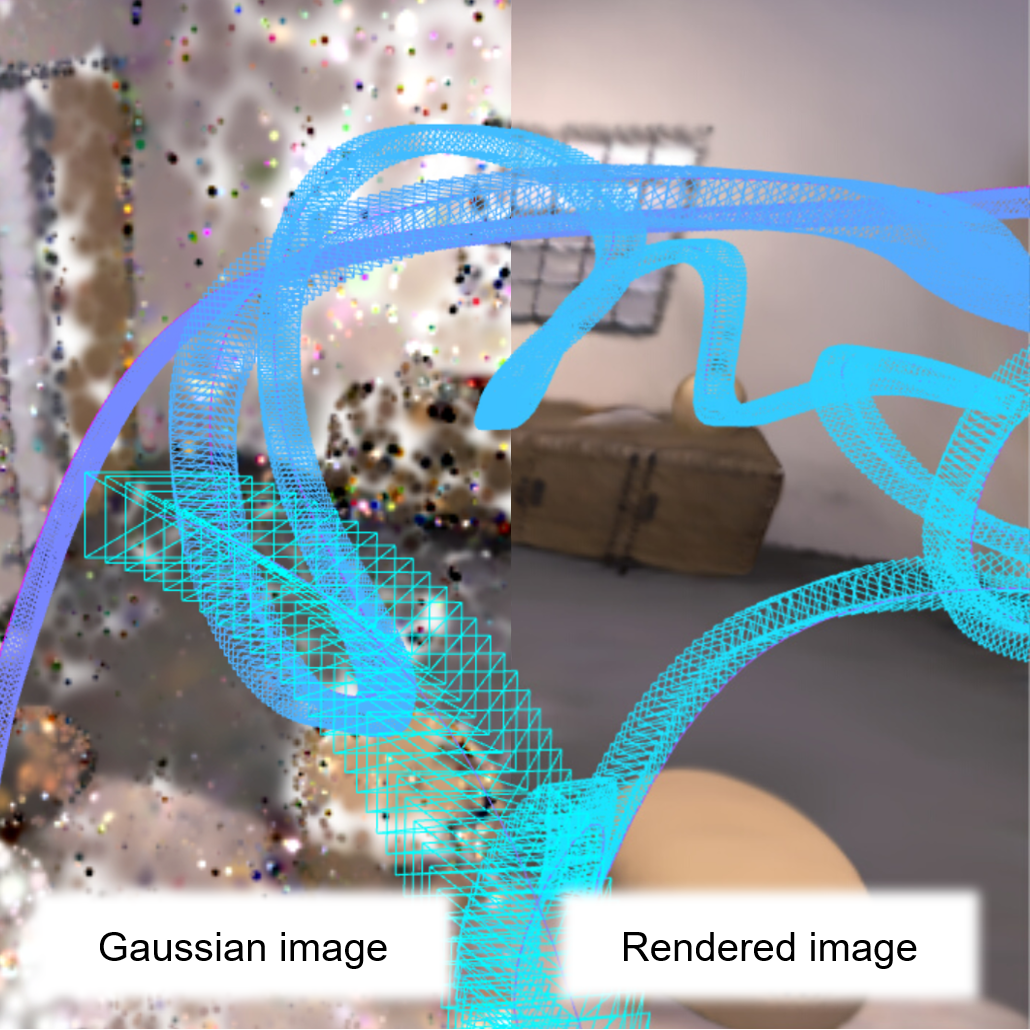
Gaussian Surfel Representation for Visual SLAM
Xingyu Chen Dissertation for master degree [thesis] A master thesis on the Visual SLAM with a planer Gaussian surfel representation. |
EngineeringI also enjoy some system design, implementation, product deployment and engineering applications. |
|
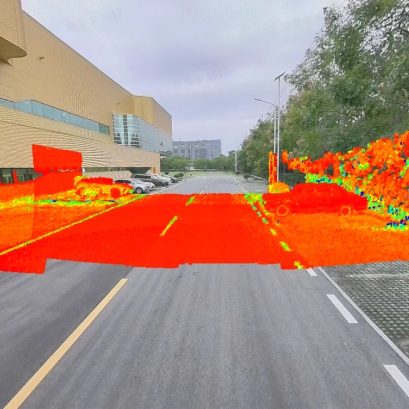
Sensor Fusion and Dynamic Simulation for Autonomous Driving
Internship guided by Dr.Panqu Wang ZERON, 2024 I led and responsible for the 3DGS closed-loop simulation of the E2E autodrive model. |
|
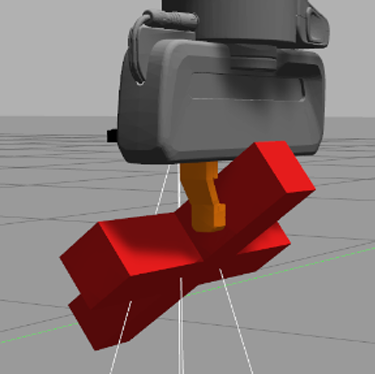
Robotic Sensing, Manipulation and Interaction
Lecture instructed by Dr.Francisco UCL COMP0129, 2023 [github] A point cloud recognition, positioning and grasping for Franka Panda Arm in Gazebo. |

|
VR Game for Multi-player Online Helicopter Interaction
Project developed based on Ubiq UCL COMP0113, 2023 [github] A multiplayer real-time synchronous game for helicopter driving in Unity on Meta Quest2. |
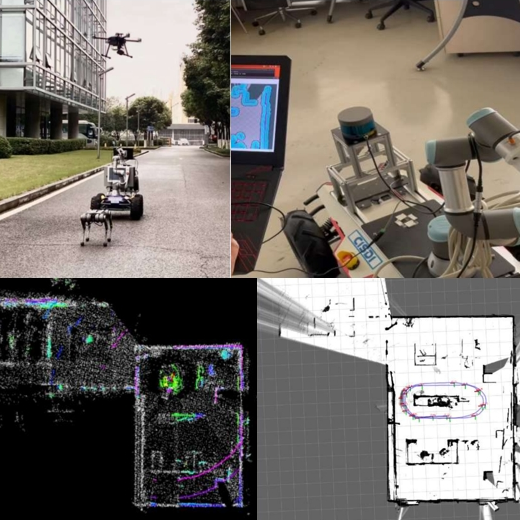 |
Mobile robotics clusters for industrial routing inspection
Internship guided by Dr.Jingya Liu MCC CISDI, 2021 I was involved and responsible for the SLAM and navigation system in collaboration robot. |
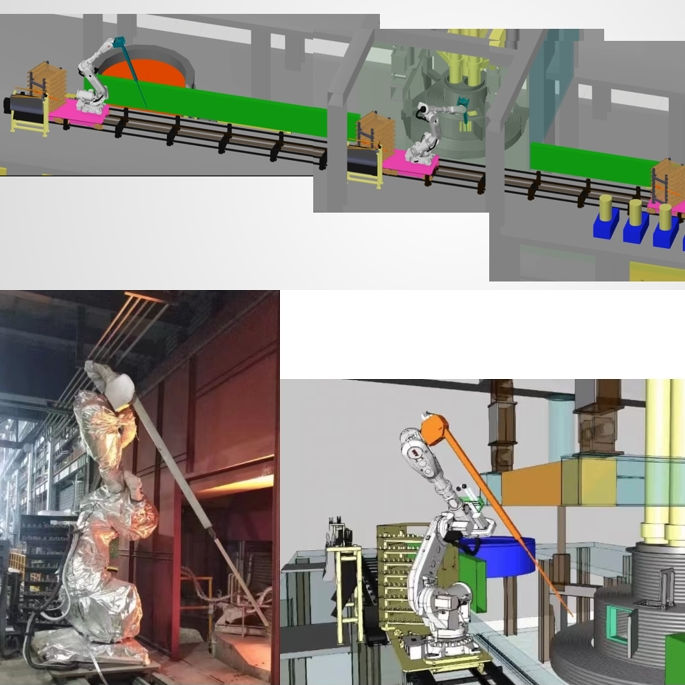 |
Visual servo robotics for metallurgical manufacturing industry
Internship guided by Dr.Jingya Liu MCC CISDI, 2020 I was involved and responsible for the simulation and integrated control in industry robot. |
Miscellanea |
 |
Waterbot's Notebook
If you are interested in the humanoid whole-body control, I maintain a blog to help beginners quickly go through key points and getting started. [My mkdocs] |
This web template is from Jon Barron, the head icon is from 小熊貓, thank all! |